The LAS Art Foundation presents the most extensive work of artist Lawrence Lek to date on three floors of the Kranzler Eck complex in Berlin.
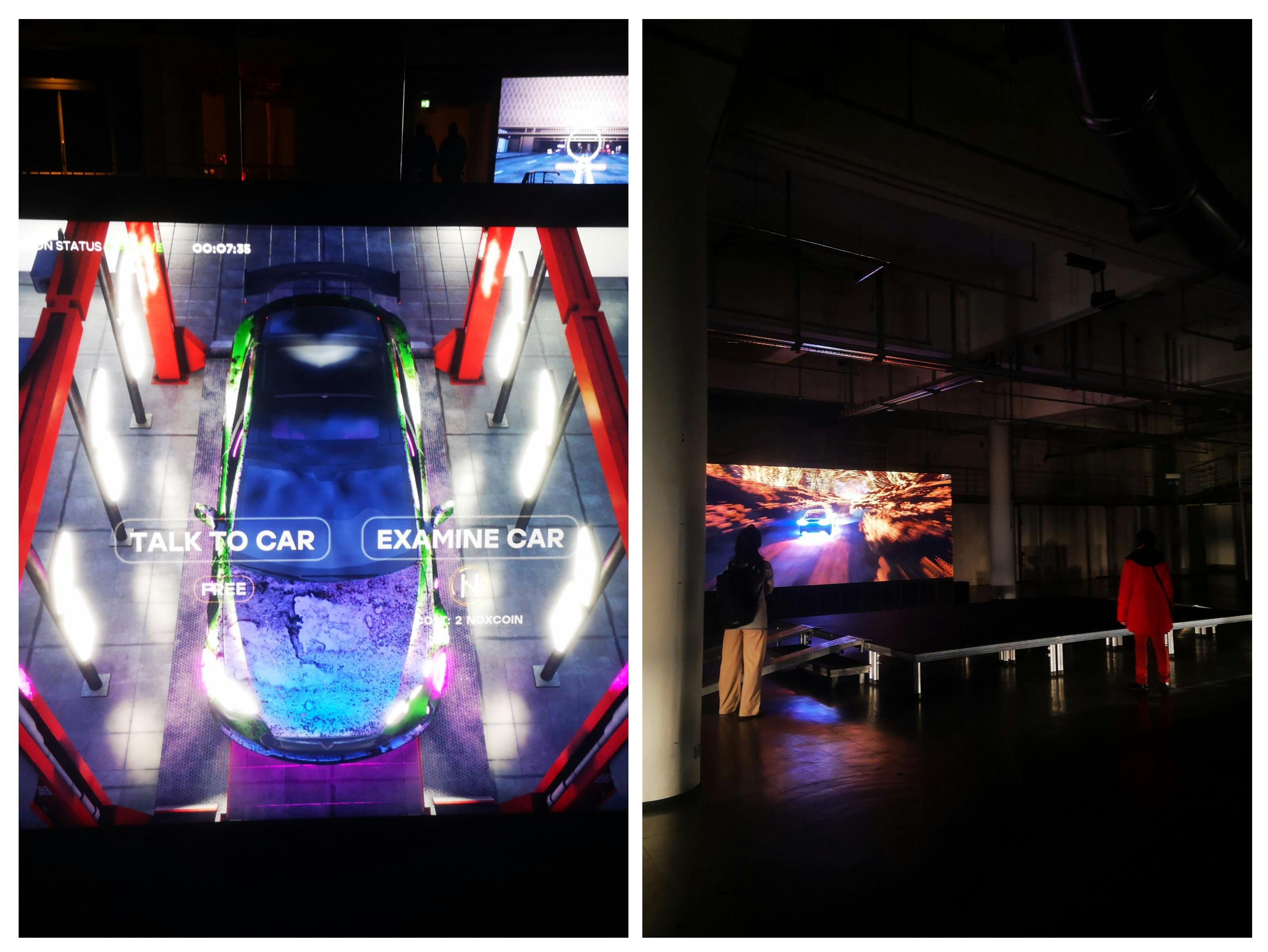
It takes the form of an open-world environment that merges physical and virtual medium with a geographical tags, spatial sound and dystopic visual experiences, that brings you back memories of your craziest car crash scene and allows visitors to fix the cars engine through an interactive game.
Entering the exhibition, you encounter a nocturnal roadscape, frozen in time. There has been a car crash. The general atmosphere is mysterious, heightened by the sounds of rain, sirens, radio interference and piano motifs.
Sound, video and game design intersect to evoke the virtual world of NOX. Lek has composed their interactions with an eye towards the specificity of each medium, and worked with scenographer Celeste Burlina to ground them within the exhibition’s physical installation and lighting design.
They evoke the moody urban settings of film noir and piece together memories and clues to make sense of the tumultuous world around them. Similarly, your own role as a visitor entering NOX is to interpret fragments of communication between its characters.
Your movement through the space generates a soundscape of ambient music, voice notes and poetic passages that alternately address a “sponsor,” “customer” and “trainee.”
Following a self-driving vehicle on an extraordinary journey emerging into a rehabilitation programme, the exhibition deepens Lek’s focus on the psychology of artificial intelligence.
NOX elaborates Lek’s exploration of a worldbuilding, a type of creative practice usually kept in the domain of science-fiction authors, technology corporations and video game developers — spectres of whom are all present within the exhibition itself. The project began with the question, “How will companies deal with misbehaving AI?”
“I always try to ground my fiction in reality. I think that the more speculative the scenarios an author creates, the more they need to integrate details and nuances that can only come from close observation of how strange and unexpected the real world actually is.”— LAWRENCE LEK
Lek has been using the game development platform Unreal Engine to create virtual environments, games and CGI films and videos since 2016. For NOX, he has simulated the physical installation at Kranzler Eck and used CGI modelling to develop it into Farsight’s training facility, which is seen in the videos and training simulation.
Lawrence Lek’s “Sinofuturist cinematic universe”
Artist Lawrence Lek’s car crash scenarios brings us profound questions about life in the age of automation. Since 2016, these have taken the form of films, games, installations and soundtracks that together build what he calls a “Sinofuturist cinematic universe.”
Each work explores a different facet driven by the industrial expansion of the fictional AI enterprise corporation with developing smart city infrastructure and autonomous transportation.
Lek’s works delve into the desires and fears of human and nonhuman characters as they navigate Farsight’s data-driven domain. We hear the innermost thoughts of two sentient AIs — a surveillance camera and a self-driving car — as they describe their existential crises to Guanyin, an AI therapy bot named after the Buddhist goddess of compassion.
Throughout the programme, Guanyin and the cars maintain open communication with patrons, charting progress as they work through sources of trauma and malfunction in the hopes of restoring “excellence.”
NOX stands for Nonhuman Excellence. What is presented in Lawrence Lek’s NOX as a catalogue of therapeutic measures has concerned AI scientists since the term for artificial intelligence has invented.
Training AI: How does artificial intelligence learn?
In discussion with Prof Dr Wolfgang Wahlster (German Research Center for Artificial Intelligence (DFKI)) emphasizes the importance of autonomous cars’ governance and the need to prioritize safety over cost-cuttings.
Autonomous cars’ safety and legal implications
“Communication channels between the cars is already employed today in some cars, but it’s a significant reason for the so-called communication. It can be used not only for security and safety reasons but also to facilitate education changes effortlessly and create a community to exchange the ideas. This helps these cars find and establish more effective routes.
Data Ethics and Collaboration
There are icons in the so-called data ethics condition, involving people from ethics, theology, computer science, and lawyers to the interior industry. It was highly appreciated by the European Union, as well as in the US. In summary it emphasizes decision making that prioritize human well-being. The image of humans, compared to the dimensions of cars or physical structures, is extremely significant. So, that’s the first axiom to consider.
Ethical Decision-Making and Pre-Crash Avoidance
According to European values, individuals are encouraged to make their own decisions. However, what if you have to navigate through a group of people? In extreme cases, the decision could favor people with a Ph.D. degree. This may be argued in a German court. Ideally, one should claim the decisions intuitive and not premeditated. Giving rules or making decisions should involve consultation with others. Another aspect not implemented in these cars is pre-crash avoidance. This has now became a standard in briefings. Even if a collision cannot be avoided, there are strategies to minimize harm. For instance, slowing down in a way that minimizes impact when colliding with no one else on the road.
There are numerous ethical rules included in these systems, aligning with the regulations for autonomous cars in Europe. This is inherent and cannot be changed, much like genes. This is crucial, although sometimes things can go wrong. For example, in the US, a school bus driver tried to avoid hitting a deer on another road. The decision led to some children being heavily damaged, highlighting the complexity and challenges.

MIT Studies and Social Behavior
MIT is extensively studying how people interpret and decide in various situations. We have tested and developed systems for two years, treating each car as an agent. This is unrelated to private driving; a private car is just a passenger. However, cars can communicate, sense problems, and exchange messages. For example, one car senses an oil spill and communicates with others to alert them. This social behavior contributes to safer driving.
Communication Between Cars and Social Behavior
In various situations, messages can be sent. Some cars already implement this feature. For instance, one car warns another not to overtake because another car is approaching from behind, not visible to the first car. This can prevent accidents. Then we can extended this to motorbikers, who are more exposed to problems. The data exchange between cars helps protect bikers from potential dangers. Similarly, we considered scenarios where a human driver might face health issues. The car should adapt and take control to ensure safety. Although it’s effective, the cost of implementing such features in every car is currently high.

Advanced Car Features
Now, let me present one of our developed cars with unique features, addressing issues present in other cars. It’s fully electric, with a motor in each wheel, allowing it to change shape and climb stairs. It can also engage in energy-sharing with other cars, enhancing efficiency. This cooperative behavior is superior. To sense the environment, various sensors are used, including lasers, radar, and video cameras. Each wheel can be controlled independently, providing unprecedented flexibility. This car is not just an autonomous vehicle but a mobility platform, a service platform, a communication platform, and a security platform. It adapts to situations and provides additional light during the night, enhancing safety.
Machine Knowledge Acquisition
Learning is essential for survival and problem-solving. We extract information not only from data but also from literature. The combination allows the system to draw conclusions and generate new knowledge.
Supervised learning involves providing labeled data, while unsupervised learning is more complex, relying on clustering. Self-supervised learning is a newer concept where the system gets unlabeled data and learns from its failures, optimizing itself. Reinforcement learning, resembling human learning, involves rewarding correct actions and learning from mistakes.
However, it’s crucial to note that as systems become more autonomous, they encounter challenges, including overfitting and the need for explainability. We aim for systems that assist and enhance human rationality rather than replace it.
In conclusion, the journey of machine learning has brought significant advancements, but there’s a need for continuous improvement in trustworthiness and explainability.”
